Click here to return to the Z8000 master board index.
The bus supervisor board is a software development tool. Because it uses a Raspberry Pi, it’s clearly not vintage. Sure, if you wanted a true vintage, you could edit your software with ED, you could burn your ROMs and UV erase them as necessary, and you could carry floppies from one computer to another. That’s fun for about 5 minutes.
This board is intended to allow you to do two things. First, it enables rapid CP/M development. You can build your CP/M image on your host Linux computer, then then using this board you can load that image directly into RAM. This avoids having to re-burn the Flash every time you want to test a change. You can also read and write arbitrary memory. You can reset the Z8000 Modular computer from your Linux box.
Second, it emulates a CP/M hard drive. This drive can be read/written on both your Linux machine and on the Z8000 Modular Computer. You can edit a C source file on your Linux box, copy to the disk image, and then compile and run that file on the Z8000. This eliminates the need to sneakernet files back and forth between computers.
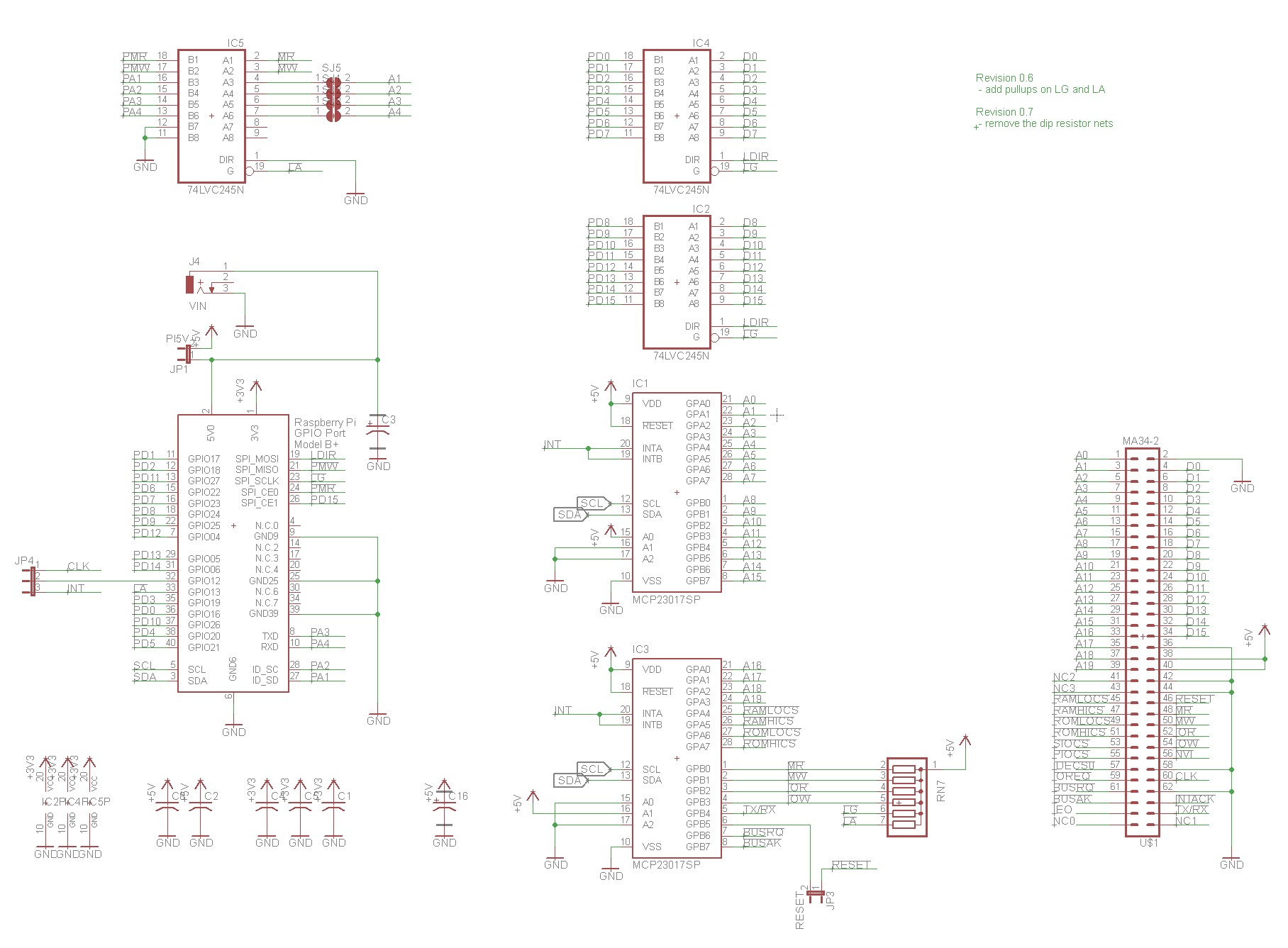
Schematic
As usual, the schematic:
Jumper Settings
- JP1. This is not a jumper. It’s a 5V/GND header for the pi. Don’t jumper it, or you’ll be sorry.
- JP3. If you did not install the MAX811 reset circuit on your Z8000 CPU board, then you can install this jumper. If you did install it, then you’ll have to manually run a wire from pin 2 of this jumper over to pin 2 of SV1 on the Z8000 CPU board. This is because we need to trigger resets on the input to the MAX811, not the output.
- JP4. Leave this one unpopulated. The idea was to either be able to sense the interrupt signal or the clock signal. We don’t need either at this time.
Bill of Materials (BOM)
Nope.
Hopefully by the time someone reads this, you can actually buy raspberry pis again… Remember 2022, anyone?
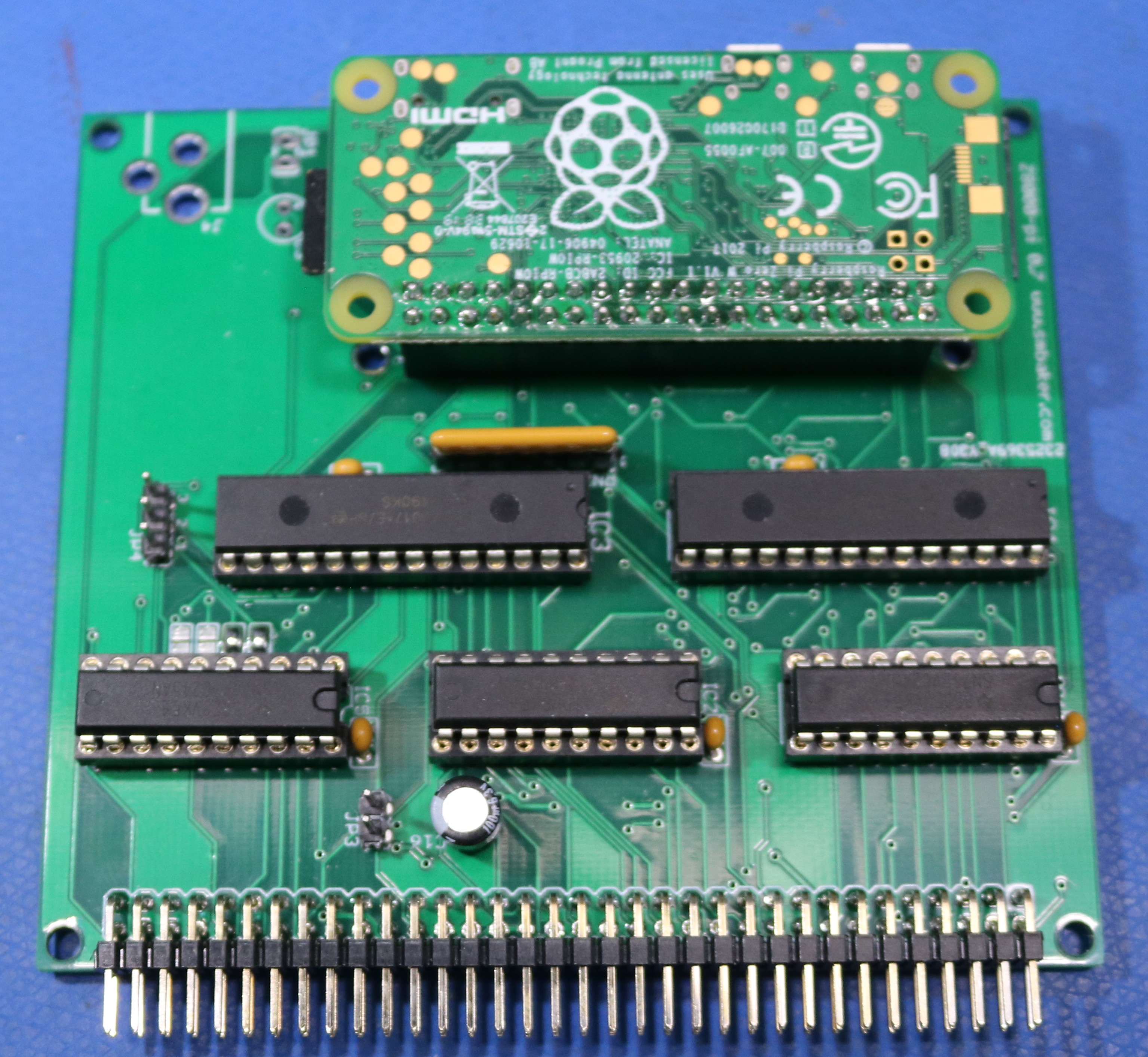
Board Images